Published by: Zeng Xiansen Edited: Zhou Tongjiang
WUST News (Correspondent: Zeng Xiansen) – A research work of Dr. Lin Yunhan's team from the School of Computer Science and Technology, titled LangGrasp: Leveraging Fine-Tuned LLMs for Language Interactive Robot Grasping with Ambiguous Instruction, has been accepted by the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025). Dr. Lin Yunhan is the first author of the paper, with master's student Wu Wenqi as the second author and Professor Min Huasong, Director of our Institute of Robotics and Intelligent Systems, as the corresponding author.
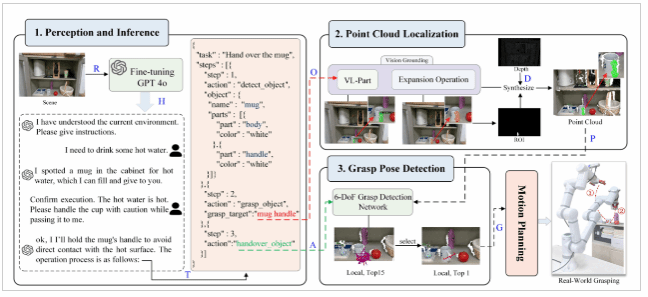
The paper introduces LangGrasp, a novel robot grasping framework that leverages natural language interaction and commonsense reasoning powered by large language models (LLMs). This innovative framework integrates fine-tuned LLMs to leverage their robust commonsense understanding and environmental awareness capabilities. By inferring implicit intentions from language instructions, LangGrasp clarifies task requirements and target operation objects for manipulation. Furthermore, the team’s point cloud localization module, guided by two-dimensional component segmentation, enables the localization of partial point clouds within a scene. This advancement extends grasping operation from a coarse-grained object level to a fine-grained component level, significantly enhancing the quality and precision of the six-degree-of-freedom grasping poses for target objects.
The IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), established in 1988, is a premier global forum for robotics and intelligent systems research. IROS brings together leading experts and scholars from around the world to foster innovation and advancements in the field. In 2025, IROS will return to China after a 20-year hiatus, taking place in Hangzhou, a city renowned for its rich history and technological innovation.
The theme of IROS 2025 is Frontiers of Human-Robot Interaction, highlighting groundbreaking advancements in artificial intelligence and robotics, and exploring the latest frontiers in human-robot collaboration, intelligent systems, and robotic applications. During the conference, various activities such as keynote speeches, paper presentations, specialized seminars, industry forums, robot exhibitions, and technical tours were held, providing a high-level academic exchange and collaboration platform for global robotics scholars and practitioners.